所屬科目:【阿摩】未分類題庫
1.ADXL345 為一個三維加速度計,溫度的變化會影響其輸出結果,0.01%/℃為其精確度之單位。當一物體以 0.01g 之加速度移動 10 秒,結果得到有 5 公分的誤差,試問其環境溫差為多少? (g=10m/s2) (A)1 (B)10 (C)100 (D)1000 ℃。
2.令 L 代表直線平移以及 R 代表旋轉關節,通常工業用 6 軸機械臂之運動自由度為下列何者機械結構? (A)R3L3 (B)R4L2 (C)R5L (D)R6。
3.以下哪項是正確的? (A)額定荷重就是最大荷重 (B)額定荷重值因機器人的伸展姿態不同而有變化 (C)額定荷重大小與荷重重心相對於腕中心點的距離有關 (D)額定荷重是指機器人在初始位置時的最大荷重。
4.設備防護等級 IP(Ingress Protection)30 表示 (A)第一個字代表防塵等級 (B)第 2 個字代表防水等級 (C)無論第一或第二數字,數值越大防護功能越好 (D)以上皆對。
5.請問哪一項是正確的? (A)一般而言,串列機器人比平行機器人有較大的工作空間 (B)平行機器人有高剛性 (C)SCARA 機器人適合產線裝配 (D)以上皆正確。
6.機器人有時需要七個自由度,哪項不是實際考量的原因? (A)擴大作業空間 (B)避開障礙物 (C)可不必所有關節皆須同步運動,安全考量 (D)避免某一軸故障時仍有足夠的自由度可用。
7.移動式機器人與固定基座工業機器人的最大不同點是 (A)移動式機器人的工作空間為無窮大 (B)移動式機器人的導航控制技術遠比固定基座工業機器人複雜 (C)移動式機器人可選擇合適的移動平台在三度空間中移動 (D)以上皆是。
8.馬達電機廣泛應用於各種不同機具上,機具也會依據不同的工作環境挑選不同的電機,其 中無刷馬達比有刷馬達在下列哪種環境下更有優勢? (A)碾米廠 (B)木材加工廠 (C)化工場 (D)以上皆是。
9.伺服馬達在額定轉速 2000rpm 下之額定最大轉矩 2Kg-m,若要在此額定轉速下產生 1960N-m扭矩輸出,則應設計採用何種比例之減速比? (A)100:1 (B)10:1 (C)50:1 (D)70:1。
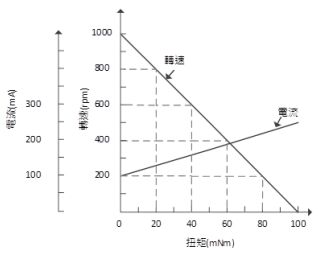
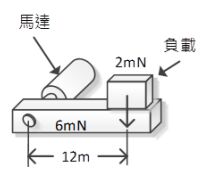
10.如圖(a)所示為一個永磁(PM)馬達的扭矩轉速曲線,圖(b)所示,該馬達連接於一個長 12m 的機器手臂上,並且手臂末端有一個負載,其所形成的力為 2mN,假設手臂為一個均勻分布的剛體,其重量集中於手臂的重心位置上,而手臂重量所形成的力是 6mN,則該馬達轉速應為?(A)200 (B)400 (C)600 (D)1000 rpm。
11.如何計算伺服馬達的等效扭矩? (A)總運動過程中所有扭矩的絕對值之總和 (B)總運動過 程中所有扭矩的絕對值之平均 (C)總運動過程中所有扭矩的方均根植 (D)總運動過程中所有 扭矩的最大值。
12.當伺服馬達驅動一個滾珠導螺桿機構時,若螺桿導程為 0.02m,機械效率為 0.9,工作物的 質量為 10kg,摩擦係數為 0.1;則當工作物無外力作用下,馬達所需的移動力矩為何? (A)0.025 (B)0.030 (C)0.035 (D)0.040 (N-m)。
13.有關保險絲之敘述,下列何者錯誤? (A)可分為慢速型、普通型、快速型三大類 (B)使用 環境之溫度對於保險絲的熔斷也是一項重要的因素 (C)防止大電壓破壞電路 (D)保險絲應接 於火線上,以便其熔斷時,線路馬上斷路。
14.步進馬達停止脈波輸入時,下列敘述何者是正確的? (A)轉子可自由的被轉動 (B)轉子會轉回啟動時的位置 (C)轉子會繼續轉動 (D)轉子會停止,並保持在目前的位置。
15.製作機器人系統時經常會使用到伺服馬達或是步進馬達,將兩者的特性做比較,下列何者的敘述是錯誤的? (A)伺服馬達是依據訊號回授做閉迴路控制,步進馬達依據脈波的數量及頻率做開迴路控制 (B)步進馬達在一般使用時為低速運轉,馬達轉矩會因為在高速運轉下而逐漸降低 (C)步進馬達的構造相較於伺服馬達簡單,經常被使用在小型設備上 (D)伺服馬達在做定位時,不需精確相對於原點的位置,且相較於步進馬達加速和減速的反應時間較快。
16.下列何者不屬於選擇馬達控制系統所需具備的基本知識? (A)電源的型式:電壓及頻率、 單相或三相、電流限制 (B)馬達的型式與尺寸:額定功率與速度、全負荷額定電流、固鎖- 轉子額定電流 (C)運轉需求:負荷循環(連續、啟動/停止、或間歇、單一或多段速度,或可 變速度運轉、單向或反轉) (D)馬達控制系統的外觀。
17.伺服馬達與普通馬達之不同點,下列敘述何者錯誤? (A)起動轉矩大及良好直線控制特性 (B)速度變化性高 (C)轉子細長,重量輕,以減低機械常數 (D)電機具高電感特性,以減低電 氣時間常數。
18.有一伺服機之輸入訊號所需的控制週期為 20ms,其脈波寬度在 1.0ms 到 2.0ms 之間,其寬度對應伺服機轉動的方向及角度的關係如下,若輸入脈波寬度為 1ms,則伺服機轉至 0°的位置;1.5ms 則轉至 90°的位置;2.0ms 則轉至 180°的位置,欲使伺服機轉至 60°的位置,則輸 入訊號之脈波寬度需調為多少? (A)1.25 (B)1.75 (C)1.33 (D)1.88 ms。
19.以下敘述何者有誤? (A)齒輪傳動系統的輸入及輸出軸必需是平行的 (B)齒輪傳動系統具 有製造成本高及組裝誤差會引起噪音等缺點 (C)皮帶傳動系統除了傳動平滑外,亦有助於吸 收震動 (D)齒輪傳動系統具有高效率、高可靠度及小型化等特點。
20.以下敘述何者有誤? (A)多數的止推軸承僅能承受極小或完全無法承受徑向負荷 (B)在無 任何元件產生永久變形的條件下,軸承所能承受的負荷值為基本靜額定負荷 (C)標準單螺紋 Acme 螺桿,相當高的效率是其重大的優點 (D)螺桿運轉的速度要低於臨界速度的 0.8 倍。
21.選用皮帶作為傳動系統時,下列有關平皮帶與 V 型皮帶之比較,何者有誤? (A)平皮帶的運 轉速度可以比 V 型皮帶高 (B)在相同的預拉力下,V 型皮帶有較小的滑動 (C)在相同的皮帶輪 直徑上,V 型皮帶有較大的彎曲變形 (D)V 型皮帶需較大的預拉力防止滑動。
22.使用一交叉皮帶輪傳動,A 輪為主動輪,轉速順時針 800rpm,B 為從動輪,A、B 輪半徑比2:5,求 B 輪轉速與轉向? (A)順時針 320rpm (B)順時針 2000rpm (C)逆時針 320rpm (D) 逆時針 2000rpm。
23.將致動器裝在機器人上時,務必要考量到運動、控制、能源、重量及大小等。請問下列哪 一個不是安裝致動器於機器人身上時應該考量的部分? (A)重量與大小等作為能量來源的密 度 (B)不易於控制的機能面 (C)供給的能量來源是否易於使用 (D)準確達成目標的運動與動 作。
24.聯軸器由兩半部組成,分別與主動軸和從動軸連接,並連接成一體,使其共同旋轉,以傳 遞運動和扭矩的機械零件。請問下列何項不是聯軸器所擁有的類型? (A)固定式聯軸器 (B) 可移式聯軸器 (C)彈性聯軸器 (D)滑性聯軸器。
25.行星齒輪系統(planetary gear train)為常用的減速系統之一,具有太陽齒輪(sun gear)、 行星齒輪(planet gear)、齒圈(annulus gear)、和行星架(carrier)等元件。下列哪一個元 件需為內齒? (A)太陽齒輪 (B)行星架 (C)齒圈 (D)行星齒輪。
26.行星齒輪系統(planetary gear train)為常用的減速系統之一,假設太陽齒輪(sun gear)為15 齒,行星齒輪(planet gear)為 45 齒,齒圈(annulus gear)為 105 齒。假設齒圈為輸入端,行星架(carrier)為輸出端,太陽齒輪固定不動,則此齒輪系統的減速比為 (A)7:1 (B)3:1 (C):1 (D) :1。
27.如圖之夾爪,靜摩擦係數至少需為多少才可夾起物件? (A)0.81 (B)0.86 (C)0.91(D)0.96。
28.以下敘述何者有誤? (A)對於物件具有不同大小的表面時,夾爪必須握住物件較大的表面,將有助於夾持的穩定性與物件的定位控制 (B)精確估計夾持物件所需的夾持是非常容易的(C)電磁式夾爪比永磁式夾爪容易控制 (D)計算機械夾爪所需之夾持力時,需要考慮夾爪與物件表面間的摩擦係數。
29.下述有關夾爪的敘述,何者有誤? (A)在大部分的用途上,機械式平行夾爪比其它型式夾爪更為精確 (B)工作完成時,電磁式夾爪需要一個移除機構或工具將物件釋放 (C)氣壓驅動式夾爪具有成本低廉、重量輕及容易使用等優點 (D)當要夾取複雜形狀的物件時,三顎夾爪比兩顎夾爪更為適用。
30.標準夾爪通常具有兩種型式夾緊動作,支點式(angular)、平行式(parallel),而驅動其動作的方法,除了用電力馬達驅動外還可以用何種方法? (A)氣體壓力 (B)液體壓力 (C)彈簧力 (D)以上皆是。
31.壓電感測器具有燒製方便、易成型、耐濕、耐高溫,但卻會有熱釋電性,導致力學量測有所干擾的是? (A)壓電石英感測器 (B)壓電陶瓷感測器 (C)壓電有機感測器 (D)壓電無機感測器。
32.考慮空間中六個自由度的運動:假設我們要使用一個以「點接觸」且其和物件表面間「無 摩擦力」的夾爪來操作立方體物件,若希望物件能穩定的跟隨夾爪的移動和轉動,則夾爪上 需至少和物件間有幾個接觸點? (A)2 (B)3 (C)4 (D)5 個。
33.考慮空間中六個自由度的運動:假設夾爪上某指頭和物件間為「具有摩擦力的軟性小接觸面」(如人手上的指頭一般),此接觸面能對物件產生移動和轉動運動自由度的限制為:(A)移動 1 個,轉動 1 個 (B)移動 2 個,轉動 1 個 (C)移動 3 個,轉動 1 個 (D)移動 3 個, 轉動 3 個。
34.如圖兩指夾具為例,F 為夾持力,W 為物體重量,μ 為夾指與物體間的摩擦係數,假設μ=0.1,安全係數為 4,請問夾持力至少要物體重量幾倍以上? (A)5 (B)10 (C)15 (D)20。
35.工業機器人操作區域可分為(Ⅰ)最大操作範圍;(Ⅱ)限制區域範圍;(Ⅲ)正在作業操作範圍,一般工業機器人在運作時,勞工可以進入之區域為 (A)Ⅰ (B)Ⅱ (C)Ⅲ (D)以上皆非。
36.機器人各類風險考量哪項不正確? (A)應先行以設計或替代方式消除或降低 (B)以安全防護或其他補充措施為之 (C)任何殘留風險則應考量以其他措施降低如警告,標示及訓練(D)操作者小心就不會有風險。
37.起動機器人前,應先確認事項中何者不在危害預防標準內? (A)在可動範圍內無任何人存在 (B)移動式控制面盤、工具等均已置於規定位置 (C)機器人或關連機器之異常指示燈等均未顯示有異常 (D)機器人能否啟動。
38.雇主為防止勞工與機器人接觸引起之危害,機器人遇到下列哪些狀態時,應可自動停止動作,並設置指示燈。①因油壓、氣壓或電壓之變動,有發生錯誤動作之虞時;②因停電等致動力源被遮斷時;③因關連機器發生故障時;④因控制裝置發生異常時。請問以上哪些項目是正確的? (A)①②④ (B)①②③④ (C)①③④ (D)②③④。
39.下列何者為協同操作要求中的奇異點保護處於手動減速模式或手動導引時,機器人應執行的項目之一? (A)於機器人穿越奇異點或因奇異點而修正前,提供警示且無須停止機器人(B)產生一可聽或可見之警示信號並持續穿越奇異點,為了加速穿越奇異點機器人手臂個連桿速 度之最大速限為 400mm/s (C)若奇異點為可控制且不致造成任何危害運動,則不需採用額外保護措施 (D)以上皆可。
40.對於工業機器人系統本身的相關資訊描述,下列何者有誤? (A)描述由控制系統執行之安全功能及其安全完整性、個別停止電路、安全控制器及安全通訊的安全要求規範 (B)描述系統、其配件、其防護及/或保護裝置的詳細說明 (C)描述關於電氣設備的技術文件 (D)描述使用之個人防護具及所需的訓練。
41.以下哪種夾爪依賴於氣流來實現夾取作用? (A)柔性夾爪 (B)液壓夾爪 (C)真空夾爪 (D)電動夾爪。
42.以下哪種夾爪可以提供較穩定且精確控制的夾持力? (A)柔性夾爪 (B)液壓夾爪 (C)真空夾爪 (D)電動夾爪。
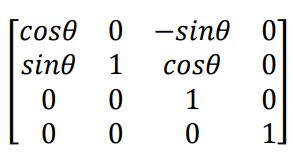
43.根據 D-H 表示法之轉換矩陣,下列何者可表示三維空間中,對 Z 軸旋轉 θ 角? (A) (B)(C) (D)
44.若一具泛用型工業機械手臂具有 4 自由度,則至少需要的致動器數量為何? (A)3 (B)4 (C)5 (D)6。
45.機器人定位控制中,何種控制可用來消除穩態誤差? (A)P 控制 (B)I 控制 (C)D 控制 (D) 以上皆可。
46.下列何種感測元件可以感測距離? (A)電子羅盤 (B)聲音感測器 (C)紅外線感測器 (D)加速 度計。
47.機器手臂進行「線性運動(Linear)」時,指的是: (A)關節角度線性變化 (B)TCP 走直線 (C)馬達轉速固定 (D)功率固定。
48.機器手臂若要在三維空間達到任意位置與姿態(位置 x,y,z以及姿態繞 X、Y、Z 的轉向),理論上最少需要多少自由度(DOF)? (A)3 (B)4 (C)5 (D)6。
49.關於工業機器手臂的「奇異點」,下列敘述何者正確? (A)是機器手臂電力中斷時所處的安全位置 (B)在此位置附近,微小末端移動需要關節極大的速度,可能導致控制不穩 (C)是教導點數據儲存錯誤所產生的異常點位 (D)可透過更換減速機品牌來完全消除此現象。
50.在進行機器手臂的「手眼校正」時,主要目的是要精確求出哪兩者之間的轉換關係? (A)手臂基座與工具中心點 (B)手臂末端法蘭盤與相機鏡頭 (C)相機座標系與機器人世界座標系 (或工具座標系) (D)馬達編碼器數值與實際關節角度。
 阿摩線上測驗
登入
阿摩線上測驗
登入
阿摩線上測驗
登入
阿摩線上測驗
登入
 (A)200 (B)400 (C)600 (D)1000 rpm。
(A)200 (B)400 (C)600 (D)1000 rpm。 :1 (D)
:1 (D)  :1。
:1。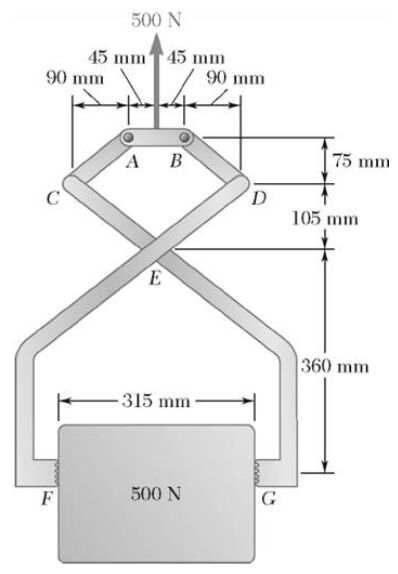 (A)0.81 (B)0.86 (C)0.91(D)0.96。
(A)0.81 (B)0.86 (C)0.91(D)0.96。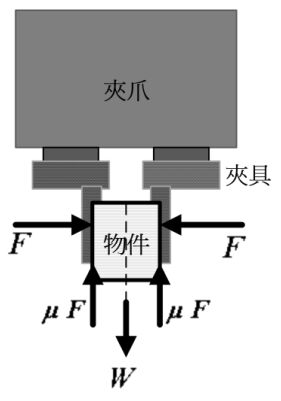 (A)5 (B)10 (C)15 (D)20。
(A)5 (B)10 (C)15 (D)20。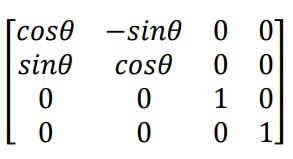 (B)
(B)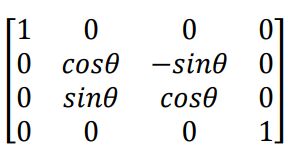 (C)
(C) 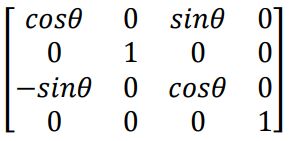 (D)
(D)